Дом / Последовательные и параллельные роботы: подробное руководство по сравнению
2025-05-16 2014
Они разработаны в соответствии с текущими промышленными потребностями и оснащены передовыми системами управления движением, которые обеспечивают точность и качество движения товаров. Этот новый диапазон движений позволяет таким параллельным роботам по сравнению с последовательными роботами работать на больших рабочих площадях, тем самым обеспечивая гибкость при размещении на сборочной линии, но, конечно же, гибкость и в промышленном применении.
Также известный как параллельный манипулятор, параллельный робот работает с несколькими независимыми кинематическими цепями, которые соединяются с платформой или конечным эффектором. Параллельные роботы обычно имеют статичное основание и известны высокой жесткостью и относительной точностью. Например, робот Delta действует как параллельный робот, который отлично подходит для быстрого захвата и перемещения.
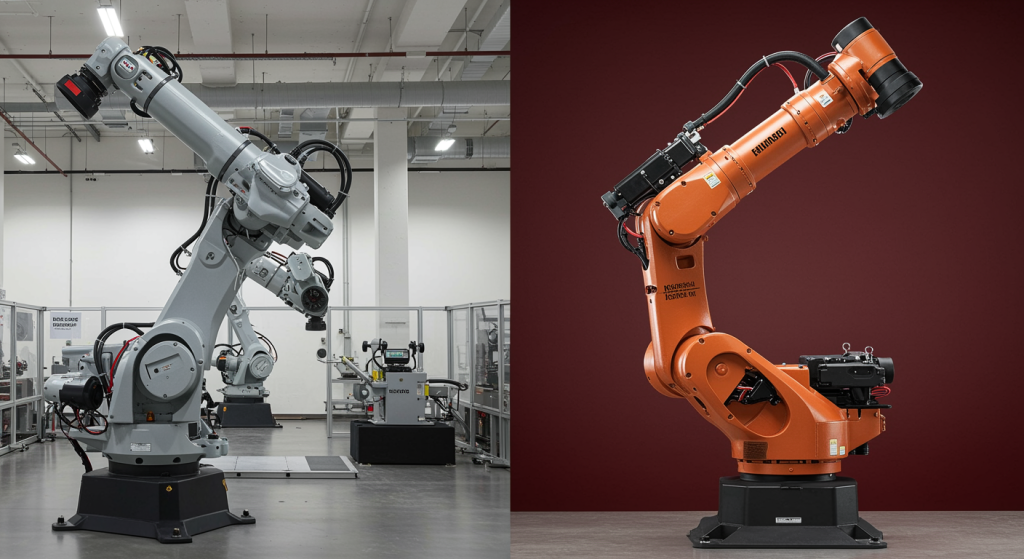
Серийный робот имеет одну цепь соединенных соединений, с концевым эффектором на последнем соединении. Наиболее распространенной формой серийного робота является шарнирная рука, используемая в промышленных условиях, таких как сварка и сборка; Серийные роботы известны своей гибкостью и способностью достигать самых разных мест.
• Параллельные роботы: Множественные существуют; К основанию и концевому эффектору подключено несколько рычагов, что создает кинематическую структуру, которая является более жесткой и вызывает меньшую деформацию. Поэтому такие конструкции сохраняют точность и устойчивость при больших нагрузках.
• Серийные роботы: Серийные роботы более точны в своих характеристиках из-за их способности двигаться на основе конструкции; Таким образом, они менее точны, чем параллельные роботы. Они также плохо справляются с более тяжелыми полезными грузами, так как используют свои суставы для маневрирования, которые могут шататься при больших нагрузках.
• Параллельные роботы: Благодаря своей кинематической структуре параллельные роботы более точны и имеют лучшее позиционирование конечного эффектора. Таким образом, они с большей вероятностью будут использоваться там, где требуется точность, например, в хирургической робототехнике или роботизированной сборке. Тем не менее, они могут иметь меньшие возможности полезной нагрузки по сравнению с серийными роботами.
• Серийные роботы: Серийные роботы, как правило, могут работать с большей полезной нагрузкой, но им не хватает точности параллельных роботов. Они предпочитают использоваться в промышленных роботизированных манипуляторах или роботизированных сварочных аппаратах из-за их грузоподъемности.
Параллельные роботы: Они известны своей быстрой работой и используются в тех случаях, когда скорость и точность могут быть достигнуты одновременно, не говоря уже о захвате и перемещении. Они жесткие и предназначены для высокоточных ситуаций.
Серийные роботы: Серийные роботы могут быть не такими быстрыми в ситуациях, как параллельные роботы, но они работают гибко, а это означает, что их можно лучше использовать в ситуациях, требующих большей адаптивности и дальности действия.
Параллельные роботы: Параллельные роботы обладают превосходной точностью и позиционированием конечного эффектора благодаря своей конструкции. Они обеспечивают невероятный уровень точности для таких вещей, как робототехника, хирургия или ситуации, требующие роботизированной сборки. Их полезная нагрузка может быть не такой большой, как у серийных роботов.
Серийные роботы: Серийные роботы имеют более высокую грузоподъемность, хотя и меньшую точность, чем параллельные роботы. Для таких вещей, как сварка или ситуации, требующие промышленных роботизированных рук, серийные роботы лучше всего подходят.
Параллельные роботы обычно более точны в позиционировании. Вот почему они используются в робототехнике для 3D-печати, аэрокосмической и хирургической робототехнике, и это лишь некоторые из них.
Там, где необходима скорость — упаковка или роботизированная сборка — серийные роботы не справляются с параллельными версиями.
Поскольку параллельные роботы более компактны, их можно использовать в более ограниченном пространстве.
Они подвержены воздействию кинематических сингулярностей, которые мешают им функционировать должным образом, а поскольку серийные роботы несколько более податливы, они могут работать в течение более длительных периодов времени, но также сталкиваются с большим количеством проблем со временем по мере износа.
Серийные роботы имеют больший рабочий диапазон и гибкость. Вот почему они обычно используются в операциях, где они нуждаются в таких вещах, как механическая обработка и работа на сборочных линиях.
Серийные роботы имеют более высокую грузоподъемность. Вот почему они обычно используются в приложениях, требующих взаимодействия с автомобильной промышленностью и тяжелой промышленностью.
Конфигурация манипулятора серийного робота может быть легко изменена и отрегулирована для выполнения различных задач, что означает, что они более выгодны в сценариях, где необходимы различные варианты.
Приложения для захвата и перемещения Роботы Delta могут работать на гораздо более высоких скоростях, используясь в высокоскоростных приложениях для захвата и перемещения в производстве электроники и фармацевтической/фармацевтической промышленности.
Хирургия Несколько параллельных роботов, таких как платформа Стюарта, используются в роботизированной хирургии.
3D-печать Применение параллельных роботов в робототехнике для 3D-печати обеспечивает более высокую точность печати.
Производственные сборочные линии Шарнирно-сочлененные роботы применяются в большинстве случаев на сборочных линиях для сварки, покраски или упаковки; Они обладают большей гибкостью и большей грузоподъемностью.
Опасные или тяжелые задачи Промышленные роботизированные манипуляторы используются для выполнения задач, требующих гораздо более тяжелых подъемных и реабилитационных работ.
Серийные
роботы часто используются для резки, сверления и сплавления в секторах мощности и гибкости.
Параллельные роботы используются в ситуациях, когда требуется скорость, точность и жесткость. Примерами являются хирургическая робототехника, 3D-печать и все, что требует высокой точности.
Серийные роботы используются в гибких ситуациях и когда доступны большие рабочие зоны, а также есть возможность для более крупных полезных нагрузок. В качестве примера можно привести сборку, механическую обработку и сварку.
В конечном счете, решение об использовании параллельного робота или серийного робота зависит от целей проекта. Там, где пространство и ограниченная полезная нагрузка не являются преимуществом, параллельный робот является идеальным выбором для быстрой и точной работы. Если вы хотите получить глубокие знания в области робототехники и промышленного использования, Warsonco Robotics будет использовать свою компетентную оценку, чтобы порекомендовать и помочь вам принять решение о подходящих роботизированных системах.