Дом / Параллельные роботы против декартовых роботов? Ключевые различия
2025-05-16 9950
Параллельные роботы (также известные как параллельные манипуляторы) — это роботизированные системы, состоящие из нескольких рук, которые работают одновременно и независимо друг от друга, прежде чем сойтись в общей точке на общем основании. Они имеют фиксированную платформу, в то время как руки движутся и помогают генерировать движение конечного эффектора. Наиболее известным типом параллельных роботов является дельта-робот, который быстро работает во время захвата и перемещения. В этой статье объясняется разница между параллельными роботами и декартовыми роботами.
Кинематическая структура: Параллельная конфигурация приводов обеспечивает улучшенный относительный контроль над позиционированием.
Степени свободы: Параллельные роботы имеют степени свободы в диапазоне от 3 до 6.
Стабильность и жесткость: Многие параллельные роботы симметричны, что обеспечивает динамическую стабильность.
Грузоподъемность: Они могут иметь высокую грузоподъемность по сравнению с их размерами, поскольку работают в сочетании с несколькими манипуляторами.
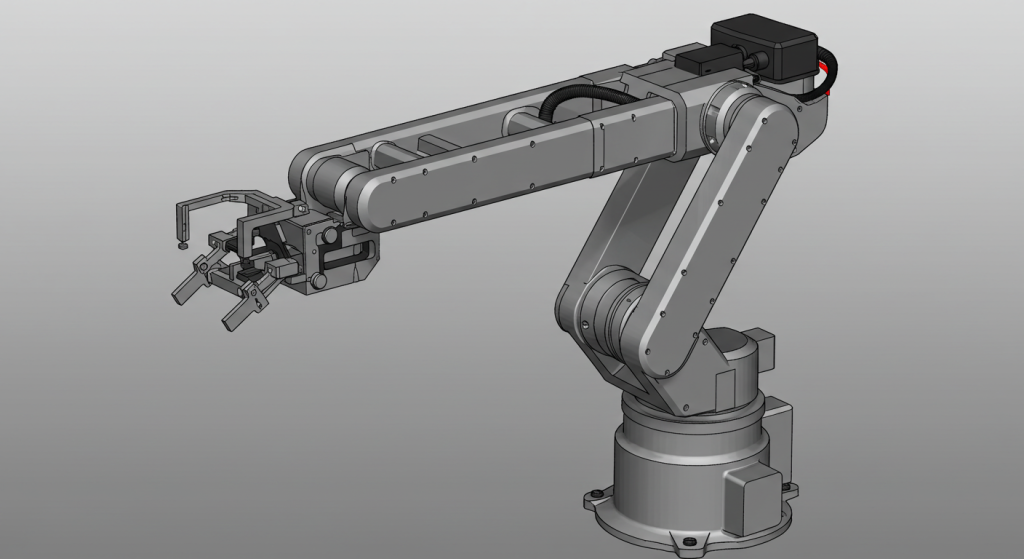
Декартовы роботы, также известные как линейные роботы, используют прямоугольную систему координат. Их движение состоит из линейных трехосевых движений: X, Y и Z. Роботизированная рука движется по заданным осям. Он часто используется для задач, требующих простоты и повторяемости, включая упаковку, сборку и обработку материалов.
Кинематическая структура: Используйте линейные приводы для работы при движении по прямой линии; Простое движение и предсказуемое движение являются их отличительными чертами.
Степени свободы: 3 степени свободы с возможностью дополнительных конфигураций осей.
Грузоподъемность: они стабильны в прецизионных приложениях; Более высокая полезная нагрузка по сравнению с параллельными роботами встречается редко.
Простая конструкция: Простота конструирования и отладки благодаря линейной ориентации.
Теперь, когда мы понимаем, что такое параллельные и декартовы роботы, давайте сравним их по следующим категориям:
Параллельные роботы: Кинематика довольно сложна. Они используют дополнительную жесткость и стабильность, особенно при задействовании динамических нагрузок. Они быстрее обрабатывают задачи, связанные со скоростью.
Картезианские роботы: Кинематика более проста. Они генерируют предсказуемое и более плавное движение. Однако подход с параллельной кинематикой может быть не таким быстрым и гибким.
Параллельные роботы: Параллельные роботы более точны, чем декартовы роботы, когда выполнение выполнено с высокой точностью/высокой скоростью. Возможность избежать ошибок при динамическом использовании уменьшается из-за конструкции.
Декартовы роботы: высокая точность возможна при перпендикулярном движении по трем осям; Тем не менее, небольшие неточности могут возникнуть, если задачи очень динамичны из-за механического люфта в соединениях.
Параллельные роботы: Параллельные роботы (дельта-роботы и т. д.) невероятно быстры и отлично справляются с высокоскоростными захватами и перемещением и упаковкой.
Декартовы роботы: Декартовы роботы могут быть быстрыми в отдельных приложениях, но в целом они медленнее, чем параллельные, особенно когда требуется скорость и маневренность.
Параллельные роботы: Параллельные роботы обычно имеют меньшее рабочее пространство, чем декартовы, но могут выполнять сложные задачи в этом меньшем пространстве с высокой точностью.
Декартовы роботы: Декартовы роботы имеют большую рабочую зону и очень хорошо справляются с задачами, требующими обширных перемещений на соответствующей большой площади.
Параллельные роботы: Конструкция параллельных роботов более сложна из-за нескольких рук и приводов; Тем не менее, их производительность лучше благодаря точности и стабильности для определенных областей применения.
Стоимость: Декартовы роботы дороги в создании, просты в обслуживании и относительно просты в эксплуатации благодаря более упрощенной конструкции. Эти элементы снижают общие затраты, и поэтому компании, которые не могут позволить себе слишком много в автоматизации, обычно выбирают декартовы системы.
Параллельные роботы: Параллельные роботы стоят дорого при сравнении затрат. Они имеют более сложную конструкцию, а материалы, используемые для их изготовления, дороже. Но они являются достойной инвестицией для точных приложений.
Декартовы роботы: Декартовы роботы часто более доступны по цене, особенно для простых задач автоматизации. Их простая конструкция и меньшее количество движущихся частей способствуют снижению цены.
Более быстрая работа: Параллельные роботы могут выполнять задачи быстрее, что делает их идеальными для задач, требующих быстрой работы.
Повышенная точность: более жесткая конструкция позволяет более точно выполнять параллельные конфигурации, особенно при выполнении задач с высокой производительностью.
Повышенная грузоподъемность: параллельные конфигурации могут работать с более массивными нагрузками и при этом достигать некоторого уровня скорости и точности.
Простота в использовании: декартовы конфигурации просты в настройке и обслуживании, что делает их экономически эффективными для задач низкого уровня.
Большая рабочая зона: Декартова конфигурация позволяет увеличить рабочую зону на основе способностей к линейному перемещению.
Цена: Декартовы роботы, как правило, дешевле, потому что в них меньше компонентов и они менее сложны.
Оба типа роботов используются в различных отраслях промышленности для различных применений с успешными результатами:
Параллельные роботы:
• Высокоскоростной захват и перемещение: Тип параллельного робота, называемый дельта-роботом, обычно используется для высокоскоростного захвата и перемещения в упаковке продуктов питания и производстве электроники.
• 3D-печать: В мире аддитивного производства параллельные роботы используются для эффективного создания моделей для быстрого прототипирования.
• Хирургическая робототехника: В областях, чувствительных к медицине, где важна точность, параллельная робототехника используется для минимально инвазивных хирургических процедур.
Декартовы роботы:
• Сборочные линии: Эти роботы используются на сборочных линиях для репликационных движений, таких как перемещение предметов с одной станции на другую.
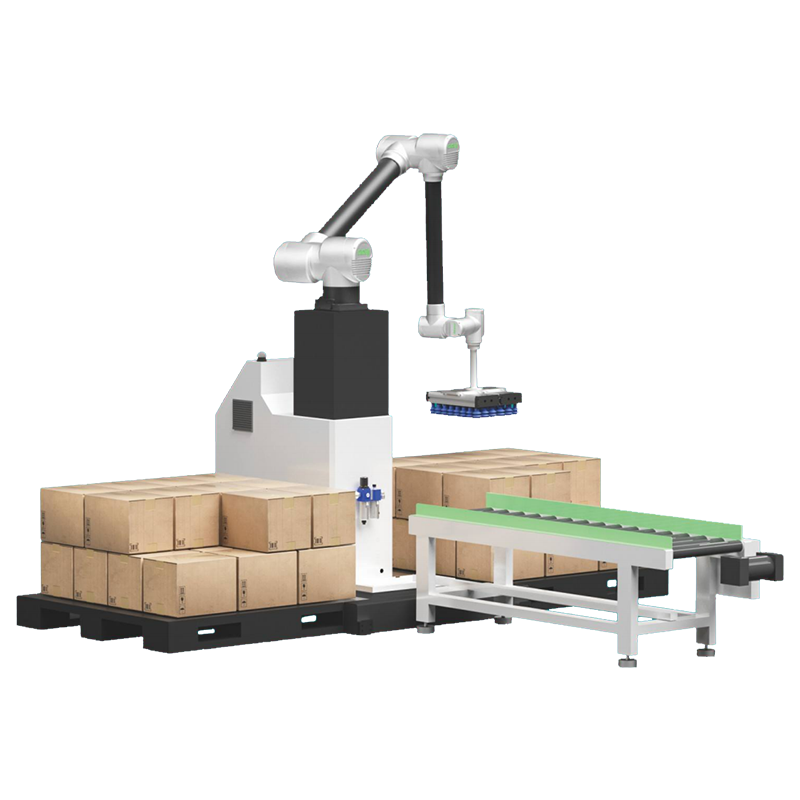
• Обработка материалов: Склады и распределительные центры используют декартовых роботов для комплектации, сортировки и укладки на поддоны.
• Станки с ЧПУ: Любые системы, требующие точного линейного перемещения, полагаются на декартовых роботов, включая станки с ЧПУ.
В конечном счете, выбор параллельных роботов против декартовых роботов зависит от этих соображений. Для получения дополнительной информации о роботизированном оборудовании и решениях для вашей области применения посетите веб-сайт Warsonco Robot Solutions. Анализ нашего дизайна, функциональности и пригодности приложения покажет, какая роботизированная система подходит для нужд организации. Наш полный каталог и краткая информация о компании Warsonco Robotics. Узнайте, как Warsonco Robotics может революционизировать ваш бизнес с помощью передовых роботизированных решений. Warsonco Robot Parallel используется в пищевой, химической, фармацевтической, алкогольной, молочной, быстрозамороженной, 3C, бытовой химии, логистике и множестве других отраслей промышленности для автоматизированной упаковки. Свяжитесь с нами прямо сейчас.