2025-05-17 6274
الروبوتات المتوازية هي سلاسل حركية خاصة حيث تملي مشغلات متعددة موضع / حركة المستجيب النهائي. تختلف الروبوتات المتوازية عن الروبوتات التسلسلية حيث يتم إملاء سلسلة من الحركة من خلال اتصال كل مفصل على حدة. بدلا من ذلك ، تستخدم الروبوتات المتوازية اتصال أرجل أو فروع متعددة يمكنها التحرك في وقت واحد نحو التشغيل المطلوب للمستجيب النهائي. يمكن أن يؤدي هذا التكوين إلى العديد من الفوائد فيما يتعلق بالثبات والدقة وسرعة التشغيل. تعرف على كيفية إحداث هذه الروبوتات المتوازية عالية الأداء ثورة في صناعات مثل الأتمتة والروبوتات الطبية والفضاء.
تلبي هذه الاحتياجات الصناعية الحالية ، ولديها أنظمة تحكم متقدمة في الحركة توفر الدقة والجودة أثناء معالجة الأجزاء. تعني القدرة على السفر لمسافات كبيرة أيضا أن هذه الروبوتات يمكن أن تمتد إلى مناطق عمل كبيرة وبالتالي توفر المرونة في تحديد مواقع خطوط التجميع ، وبالطبع مرونة الاستخدام لجميع الأغراض الصناعية. بالطبع ، يرتبط التركيز على الحركية المتوازية في المقام الأول بالحركية - دراسة الحركة دون اعتبار للقوى التي خلقت تلك الحركة - وتوجه حركية الروبوتات المتوازية كيفية تحرك المفاصل والمشغلات المختلفة والاستجابة لبعضها البعض. نوعان من الأهمية الحركية هما:
الحركية الأمامية (FK): حساب موضع / اتجاه المستجيب النهائي بالنظر إلى معلمات مشتركة معينة.
الحركية العكسية (IK): حساب معلمات المفصل التي ستجعل موضع / اتجاه المستجيب النهائي.
هذه النماذج الحركية ضرورية لتخطيط الحركة والتحكم الفعال. تتضمن الصياغة الرياضية لكيفية تحرك الروبوت عادة مصفوفات يعقوبية.
سواء كان الروبوت الموازي يحتاج إلى العمل بشكل أسرع - لتطبيقات الانتقاء والمكان أو التطبيقات الجراحية أو حتى محاكاة الطيران - فإنه يحتاج إلى السفر على طول مسار محدد مسبقا. لذلك ، تشمل خوارزميات تخطيط الحركة والتحكم ما يلي:
يعرف هذا بأنه تحديد مدى سرعة تحرك شيء ما ، وفي أي اتجاه ، ونوع التسارع / التباطؤ المطلوب لتحقيق أقصى فائدة دون فقدان الدقة. القيود هي السرعة القصوى والتسارع وغلاف العمل.
يوجد نوعان من التغذية الراجعة كعنصر تحكم في تخطيط الحركة. أولا ، يحدث التحكم في التغذية الراجعة عندما يلاحظ القياس أن الروبوت قد ارتكب شيئا خاطئا ، ويتم استخدام البيانات في الوقت الفعلي لتصحيح مثل هذه المشكلة. يوجد التحكم في التغذية الأمامية عندما يعتقد النظام أن شيئا ما سيحدث بشكل خاطئ ، فإنه يدرك مشكلة محتملة - وبدلا من استخدام البيانات في الوقت الفعلي للتعديل ، فإن هذه القياسات في الحسبان على الجانب الاستباقي.
هذه الاعتبارات ضرورية للتعامل مع أوجه عدم اليقين والاضطرابات في بيئات مختلفة. يغير التحكم التكيفي إعدادات معلمات التحكم بناء على التغذية الراجعة من أداء النظام ، بينما يضمن التحكم القوي الاستقرار حيث يتم إصلاح إعدادات المعلمات على الرغم من عدم اليقين حول النظام.
يتم تحديد الروبوتات المتوازية بشكل مفرط لبعض عناصر التحكم التي تمنع مواضع معينة. تسمى نقاط المشاكل هذه التفردات ، مما يعني أن مساحة العمل محدودة أو أن المتلاعب لم يعد يتمتع بدرجات متاحة من الحرية. يعد تجنب التفردات أمرا بالغ الأهمية للتحكم في نشاط الروبوت (أو تقاعسه) وقدرته الناجحة على إكمال المهمة. تقييم مساحة العمل هو عملية تحديد نطاق نشط للحركة لضمان وصول المستجيب النهائي إلى كل موضع يمكن الوصول إليه.
تتمتع الروبوتات المتوازية باعتماد واستخدام مماثلين عبر مجالات متعددة نظرا لتعدد استخداماتها ودقتها. التطبيقات الأكثر شيوعا هي:
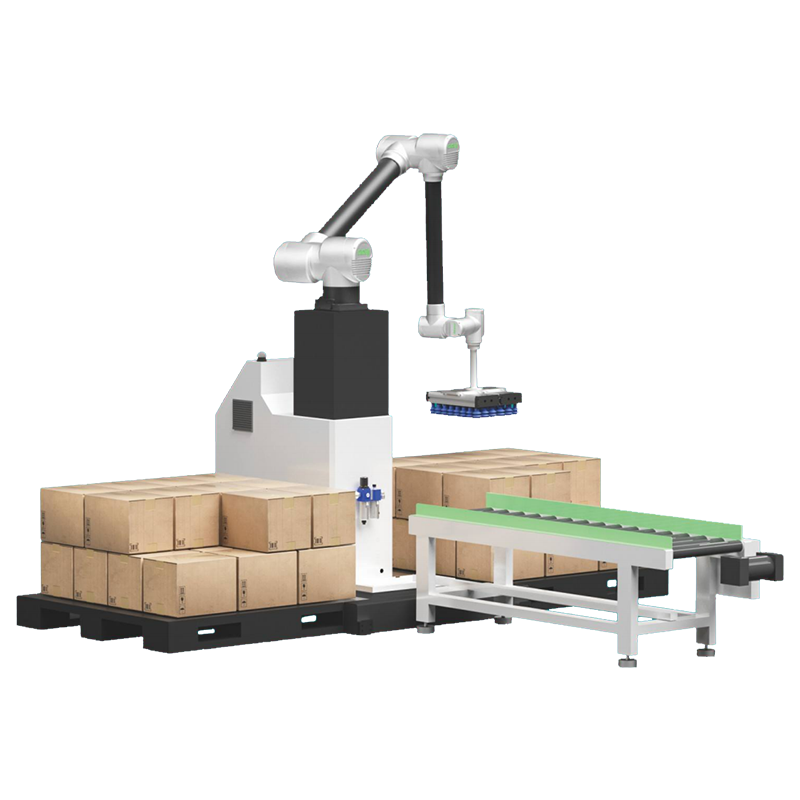
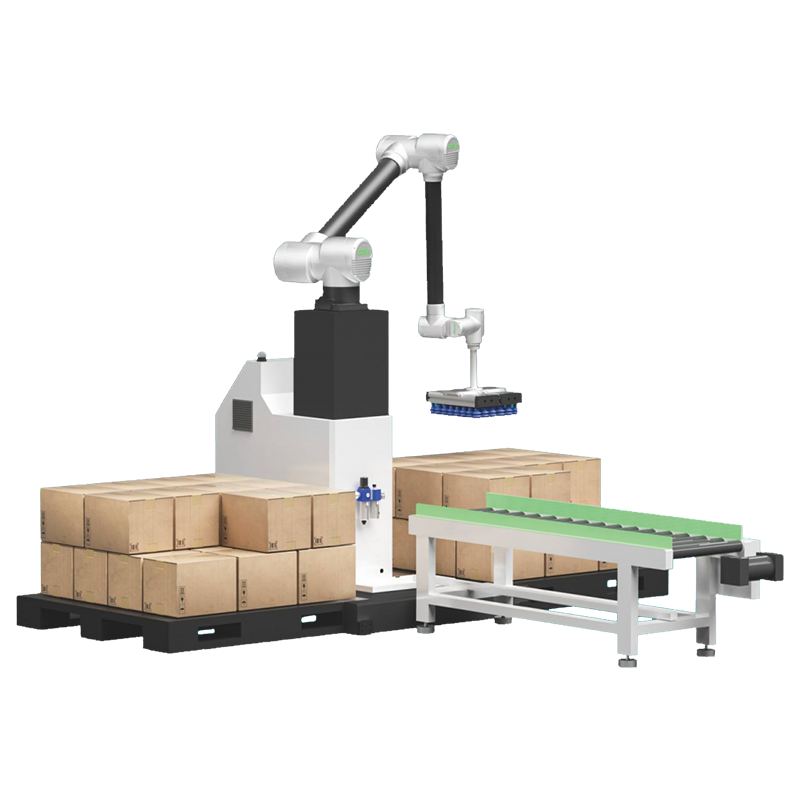
تستخدم الروبوتات المتوازية بكثافة في الأتمتة الصناعية لأنها مشغلات لعمليات الانتقاء والمكان السريعة والتجميع الآلي والأدوات الآلية. تؤثر الزيادات السريعة في السرعة والدقة بشكل مباشر على إنتاجية خط التجميع.
تستخدم الصناعة الطبية الروبوتات لإجراء العمليات الجراحية التي لا يستطيع جسم الإنسان إجراؤها بالدقة والدقة اللازمة. تسمح ميزات التحكم في الحركة المرتبطة بهذه الأنواع من الروبوتات بدقة أفضل في الجراحة ، مما يقلل من الخطأ البشري ويساعد المرضى.
تظهر منصة ستيوارت في العديد من أجهزة محاكاة الطيران لأنها يمكن أن تقدم ملاحظات دقيقة على الحركة. يسمح التحكم الدقيق في الحركة للأشخاص برؤية شعور التواجد في الهواء.
تساعد الروبوتات المتوازية في إنشاء أجهزة ردود فعل للقوة تسمح للناس "بالشعور" بشيء ما افتراضيا. هذا أمر بالغ الأهمية للألعاب والروبوتات المساعدة في الجراحة ومحاكاة التدريب.
يجب تقييم مقاييس الأداء المختلفة لتحديد ما إذا كان الروبوت الموازي يعمل بفعالية أم لا. وتشمل هذه:
• الدقة: مستوى الانحراف عن الموضع المطلوب.
• الدقة: قابلية تكرار نفس المهمة بأقل قدر من الخطأ.
• التكرار: الموثوقية في تنفيذ نفس الحركة باستمرار.
• السرعة: السرعة التي ينفذ بها الروبوت أفعاله المقصودة.
• التحكم في الصلابة والاهتزاز: تحديد مستوى صلابة واستقرار الروبوت أثناء الحركة ، وهو أمر ضروري للمهام الدقيقة.
مع تقدم صناعة الروبوتات ، هناك اعتماد متزايد على التحكم من خلال الشبكات العصبية والمنطق الضبابي. توفر هذه شكلا من حلول الذكاء الاصطناعي والتعلم الآلي التي يمكن أن تعزز أنظمة التحكم في حركة الروبوت المتوازية. علاوة على ذلك ، أصبح استخدام التحكم التنبؤي النموذجي (MPC) شائعا بشكل متزايد لتوقع الحركات وتحسين مسارات الروبوت.
يعتمد مستقبل التحكم في حركة الروبوتات المتوازية على التقدم في خوارزميات التحكم والاستشعار والحساب. ستعمل التطورات المحتملة من خلال الذكاء الاصطناعي والتعلم الآلي على تعزيز الدقة والقدرة على التكيف والاستقلالية. مع انتشار الصناعة 4.0 في جميع أنحاء العالم ، ستزداد الحاجة إلى الروبوتات الذكية وعالية الأداء بشكل متزايد ، مما يحافظ على تطور هذا المجال.
تعمل الروبوتات المتوازية على تغيير مشهد الصناعة من خلال توفير تحكم دقيق في الحركة مع القدرة على المناورة والسرعة. يعد عالم التحكم في حركة الروبوتات المتوازية مكانا مثيرا للتواجد فيه. سواء كانت مشاريعك تتضمن كل شيء من الروبوتات الصناعية إلى الجراحية ، فإن فهم أساسيات هذا المجال من الجيل التالي سيضعك في المقدمة على منحنى تعلم الروبوتات. اتصل ب Warsonco Robots لمعرفة المزيد حول الروبوتات المتوازية وتقنية التحكم في الحركة.